🤖 ros2-dockergen
![]()
![]()

![]()
![]()
![]()
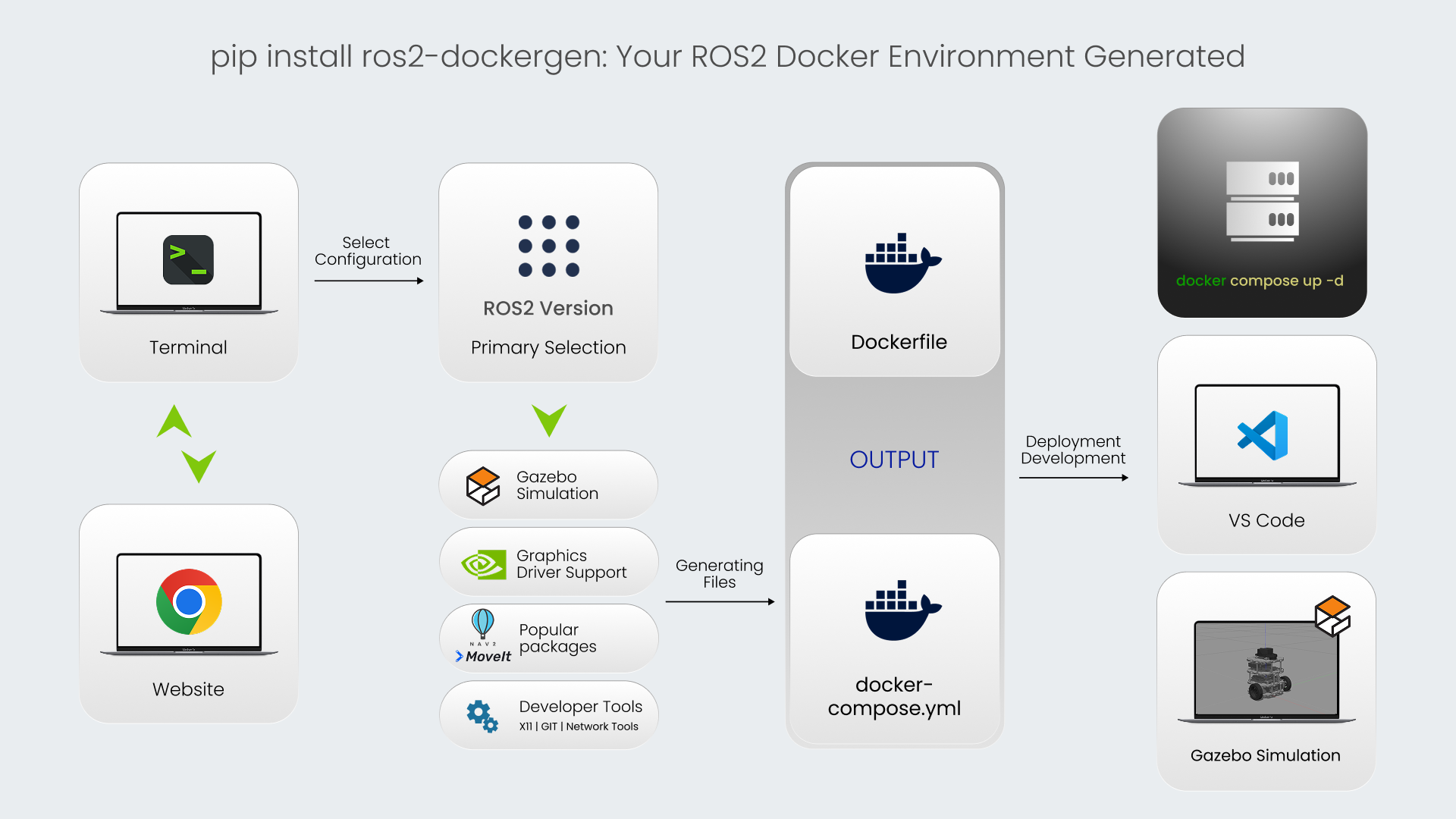
一条命令。交互式。零烦恼。
为任何 ROS2 项目生成生产级别的Dockerfile+docker-compose.yml+README.md— 直接在你的终端或网页上操作
快速安装
通过 PyPI(推荐)
pip install ros2-dockergen一行安装程序(Bash)
curl -fsSL https://raw.githubusercontent.com/ppswaroopa/ros2-dockergen/main/install.sh | bash特性
- 完整发行版支持:可选择 Jazzy、Humble 和 Kilted ROS2 发行版。
- GPU 加速:如果选择 CUDA 或 TensorRT,自动配置
nvidia/cuda基础镜像和运行时能力。 - 用户选择:支持创建非 root 用户,并自动映射 UID/GID,避免宿主卷权限问题。
- 全面工具链:可切换常用 ROS2 包(Nav2、MoveIt2、SLAM Toolbox、MoveIt、Gazebo GZ 等)和开发工具(colcon、rosdep、Oh-My-Zsh、SSH、X11)。
- 完整输出:不仅生成
Dockerfile,还生成匹配的docker-compose.yml和包含说明的工作区专属README.md。 - 网页同步:与 Web UI 共享相同的逻辑引擎。
使用方法
只需运行:
ros2-dockergen命令行选项
ros2-dockergen --help # Show help
ros2-dockergen --version # Show version使用 act 进行本地持续集成
要在本地重现主要的 GitHub Actions 工作流,请安装 act 并运行:
./scripts/run_act.sh如果您想要使用原始的完整工作流 act 行为,请运行:
./scripts/run_act.sh full📁 项目结构
src/ros2_dockergen/:核心 Python 包(CLI + 逻辑)。src/core.js:Web 和 Node.js 共享引擎(ESM)。index.html:炫酷的浏览器交互式生成器。docs/:视觉资源和项目文档。tests/:一致性验证套件(确保 Python/JS 输出字节完全相同)。
🔗 相关资源
---许可证
根据 MIT 许可证 发行。 版权所有 © 2026 Pranava Swaroopa。
--- Tranlated By Open Ai Tx | Last indexed: 2026-06-18 ---