🤖 ros2-dockergen
![]()
![]()

![]()
![]()
![]()
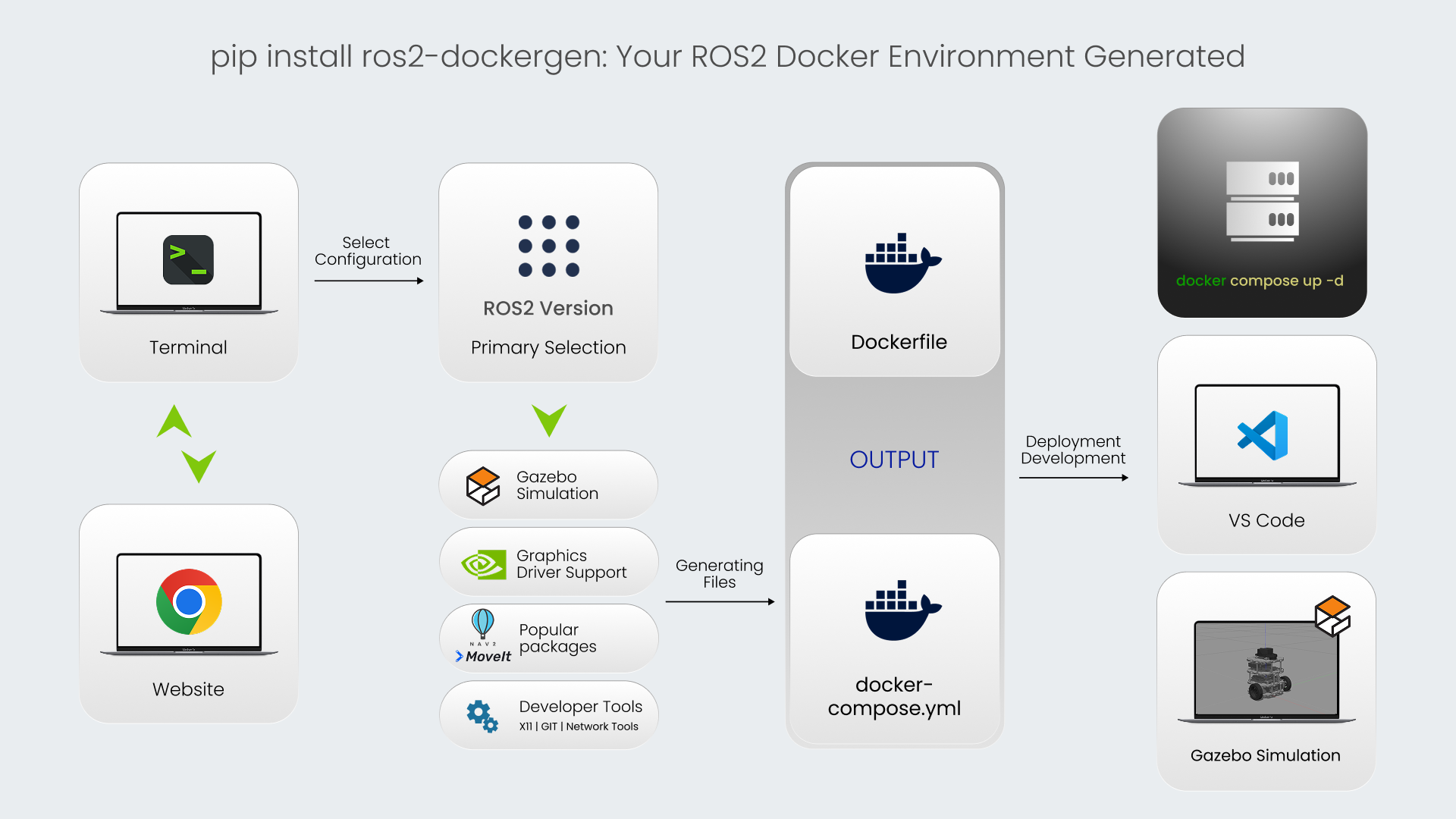
한 번의 명령. 인터랙티브. 번거로움 제로.
모든 ROS2 프로젝트에 대해 프로덕션 준비가 된Dockerfile+docker-compose.yml+README.md를 터미널에서 직접 또는 웹페이지에서 생성하세요.
빠른 설치
PyPI에서 (권장)
pip install ros2-dockergen원라인 설치 프로그램 (Bash)
curl -fsSL https://raw.githubusercontent.com/ppswaroopa/ros2-dockergen/main/install.sh | bash기능
- 전체 배포 지원: Jazzy, Humble, 그리고 Kilted ROS2 배포판 중 선택 가능.
- GPU 가속: CUDA 또는 TensorRT를 선택하면
nvidia/cuda베이스 이미지와 런타임 기능을 자동으로 구성. - 사용자 선택: 호스트 볼륨 권한 문제를 방지하기 위해 자동 UID/GID 매핑과 함께 비루트 사용자 생성 처리.
- 종합 도구: 일반적인 ROS2 패키지(Nav2, MoveIt2, SLAM Toolbox, MoveIt, Gazebo GZ 등) 및 개발 도구(colcon, rosdep, Oh-My-Zsh, SSH, X11)를 토글 가능.
- 완벽한 출력:
Dockerfile뿐만 아니라 일치하는docker-compose.yml과 워크스페이스 전용README.md를 함께 생성. - 웹 동등성: 웹 UI와 동일한 로직 엔진 공유.
사용법
간단히 실행:
ros2-dockergen명령줄 옵션
ros2-dockergen --help # Show help
ros2-dockergen --version # Show versionact를 사용한 로컬 CI
주요 GitHub Actions 워크플로우를 로컬에서 재현하려면, act를 설치하고 다음을 실행하세요:
./scripts/run_act.sh원본 전체 워크플로우 act 동작을 원한다면, 다음을 실행하세요:
./scripts/run_act.sh full📁 프로젝트 구조
src/ros2_dockergen/: 핵심 파이썬 패키지 (CLI + 로직).src/core.js: 웹 및 Node.js용 공유 엔진 (ESM).index.html: 멋진 브라우저 기반 인터랙티브 생성기.docs/: 시각 자료 및 프로젝트 문서.tests/: 동등성 검증 스위트 (파이썬/JS 출력이 바이트 단위로 동일한지 확인).
🔗 관련 자료
---라이선스
MIT 라이선스 하에 공개됨. 저작권 © 2026 Pranava Swaroopa.
--- Tranlated By Open Ai Tx | Last indexed: 2026-06-18 ---