🤖 ros2-dckergen
![]()
![]()

![]()
![]()
![]()
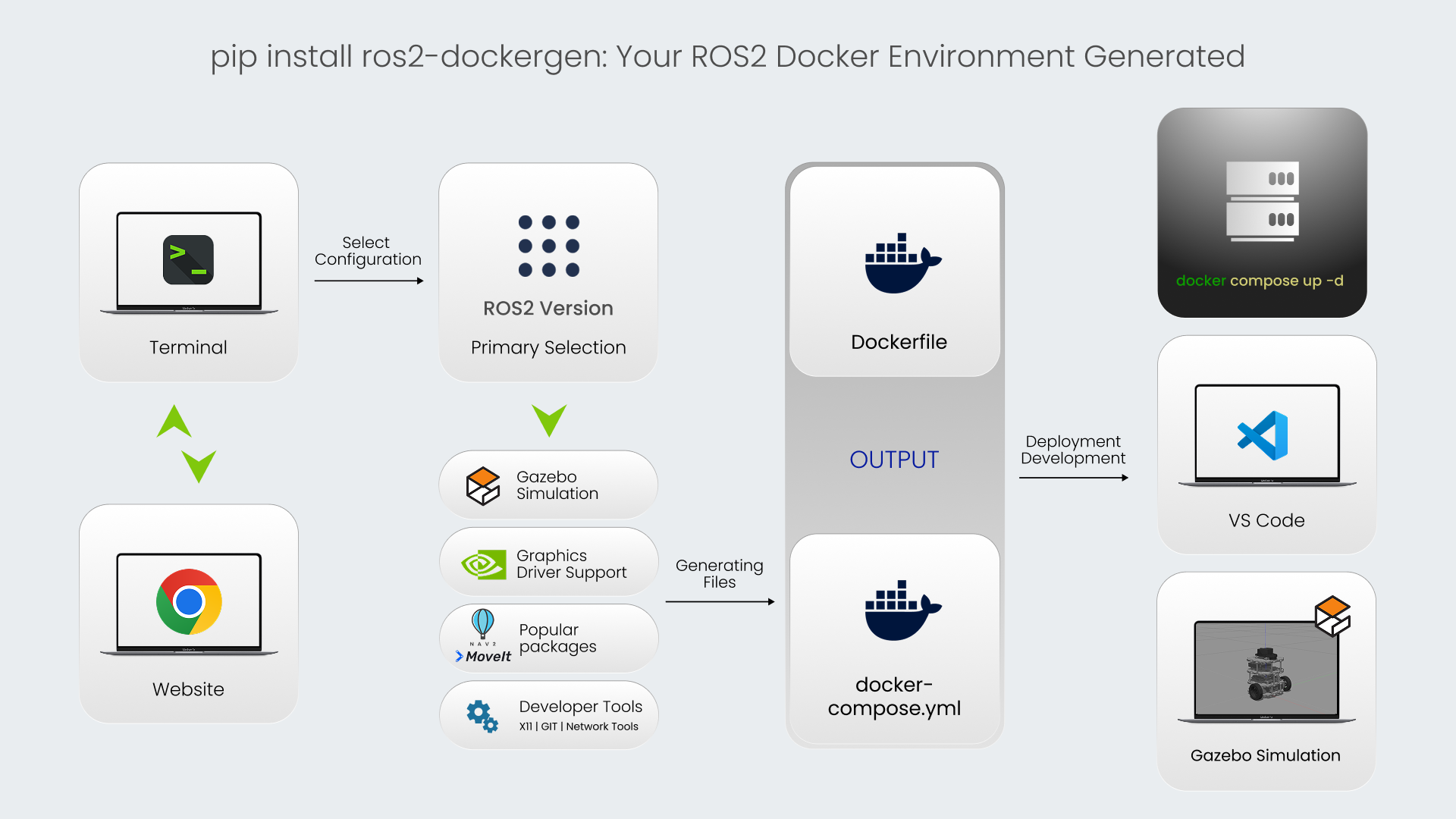
ワンコマンド。インタラクティブ。手間なし。
どんなROS2プロジェクトでも、ターミナルから、またはウェブページで、プロダクション対応のDockerfile+docker-compose.yml+README.mdを生成します。
クイックインストール
PyPIから(推奨)
pip install ros2-dockergenワンラインインストーラー(Bash)
curl -fsSL https://raw.githubusercontent.com/ppswaroopa/ros2-dockergen/main/install.sh | bash特徴
- 完全なディストリビューションサポート:Jazzy、Humble、Kilted のROS2ディストリビューションから選択可能。
- GPUアクセラレーション:CUDAまたはTensorRTが選択された場合、自動的に
nvidia/cudaベースイメージとランタイム機能を設定。 - ユーザー選択:ホストボリュームの権限問題を防ぐため、自動UID/GIDマッピング付きの非rootユーザー作成を処理。
- 包括的ツール群:一般的なROS2パッケージ(Nav2、MoveIt2、SLAM Toolbox、MoveIt、Gazebo GZなど)および開発ツール(colcon、rosdep、Oh-My-Zsh、SSH、X11)を切り替え可能。
- 完全な出力:
Dockerfileだけでなく、対応するdocker-compose.ymlとワークスペース固有の使用説明書README.mdも生成。 - Webとの整合性:Web UIと共有される同一のロジックエンジン。
使い方
単に実行してください:
ros2-dockergenコマンドラインオプション
ros2-dockergen --help # Show help
ros2-dockergen --version # Show versionact を使ったローカルCI
メインのGitHub Actionsワークフローをローカルで再現するには、act をインストールして次を実行します:
./scripts/run_act.sh元のフルワークフローの act 動作を希望する場合は、以下を実行してください:
./scripts/run_act.sh full📁 プロジェクト構成
src/ros2_dockergen/: コアPythonパッケージ(CLI+ロジック)。src/core.js: WebおよびNode.js向け共有エンジン(ESM)。index.html: 洗練されたブラウザベースのインタラクティブジェネレーター。docs/: ビジュアルアセットおよびプロジェクトドキュメント。tests/: パリティ検証スイート(Python/JS出力がバイト単位で同一であることを保証)。
🔗 関連リソース
---ライセンス
MITライセンスの下でリリース。 Copyright © 2026 プラナヴァ・スワルーパ。
--- Tranlated By Open Ai Tx | Last indexed: 2026-06-18 ---